



בהמשך לטסט הקודם ל RVOSD על הטווינסטאר שבוצע כאשר כל הציוד ממותקן בצורה הכי "ערבית" שיש עם איזולירבנד מחוץ לטיסן, החלטתי לדגם את הציוד בצורה מסודרת.
אז מה עשיתי :
1. שתלתי את ה OSD והמקלט בחללים הפנימיים של הגוף. הגוף אצלי לא מודבק. חצי אחד מודבק למערכת הזנב והחצי השני נפרד. ע"י הסרה של טסה סיבים ופתיחה של הורן ההגה כיוון אני מפריד את שני חצאי הגוף ויכול לעבוד בפנים.
2. הרכבתי VIDEO SWTICH ואני מחליף ע"י מפסק דו-מצבי בשלט בין 2 מצלמות - ה GOPRO (שגם מקליטה on-board) וה KX-191. הטסט בגו-פרו הרבה יותר ברור, אבל הבעיה היא שבמצב וידאו ולא תמונות למשל) היא widescreen עם פסים שחורים למעלהולמטה. העברת מצב מסדרת את זה אבל אז לא ניתן להקליט וידאו. מישהו מכיר פיתרון לזה ? אולי PAL במקום NTSC (ואז מפסידים 5 פריימים לשנייה) ?
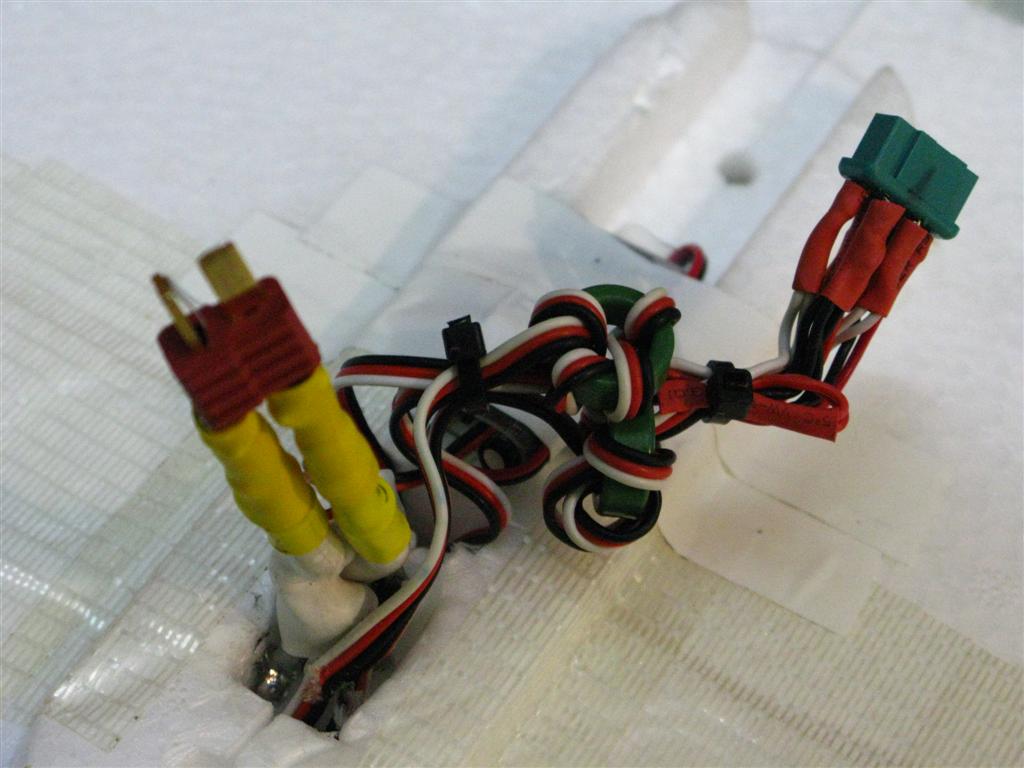
3. כל החוטים מסובבים ל twisted לצורך הפחתת הפרעות RFI\EMI
4. החיישנים XY מושתלים בתוך רמפת מייצב הכיוון וחיישן ה Z מושתל בתוך מייצב הגובה.
5. ה-GPS ממותקן בין הכנף לזנב מחוץ לגוף.
6. קונקטור MULTIPLEX מקשר את הבקרים והסוואים הכנף ומביא 5V מה BEC שנמצא במרכז הכנף בחלקה התחתון. קונקטור DEANS מביא חשמל לבקרים ולמנועים. חסכתי חיבורים ע"י איחוד סיגנלים ואדמות כשאפשר, וסיימתי בדיוק עם 6 קונקטורים (כלומר הקונקטור MPX התמלא).
טיסת המבחן למתקון החדש נערכה בעזרתו האדיבה של איציק (itzikva) בנען.
הטייס האוטומטי וה FLY-BY-WIRE תפקדו נהדר.
קצת חששתי מהקרבה של הרכיבים, במיוחד מקלט רדיו ל OSD וטרם הגעתי לטווחים מקסימליים, כך שהחשש טרם הוסר סופית.
בהמשך אעלה את סרטון ה HD מהגו-פרו ואת הסרטון מהקרקע (תודה איציק על ההקלטה).

 ציטוט ההודעה בתגובה
ציטוט ההודעה בתגובה ) :
) :



