שירשור מעולהאםפשר גם לצרף עלויות ?
דרור - יופי של הסברים ותיעוד - בהצלחה !

 מנהל פורום מסוקי דלק
מנהל פורום מסוקי דלק

שירשור מעולה
דרור - יופי של הסברים ותיעוד - בהצלחה !
צביקה
If you can't make it fly, try harder, else RTFM
חבר קהילה ותיק
למיטב הבנתי לא משתמשים ב-GPS לייצוב גובה אלא בברומטר.נכתב במקור על ידי assafwei

חבר קהילה ותיק
אכן כן. הבעיה היא שהחיווי מהברומטר לא מספיק מהיר על מנת לבצע תיקונים מידיים, אתה יכול להשתמש בו רק לתיקון ארוך-טווח (שנייה ומעלה) ותיקון מיידי לבצע על ידי אקסלרומטר.
לצערי אני יודע את זה מנסיון. יש לי QUAD מרוסק שמוכיח את זהוזו בדיוק הסיבה שנישבר לי (תרתי משמע) מלפתח לבד את ה-QUAD ועברתי ל-ArduCopter.
אגב, הריסוק של ה-QUAD הישן הרבה פחות משמעותי ממה שהיה יכול להיות, בזכות טייס הניסוי המעולה (איתי כספי).
דרור
חבר קהילה ותיק
בסוף השבוע האחרון התחלתי בהרכבה, לאחר שקיבלתי מאיציק את השילדה.
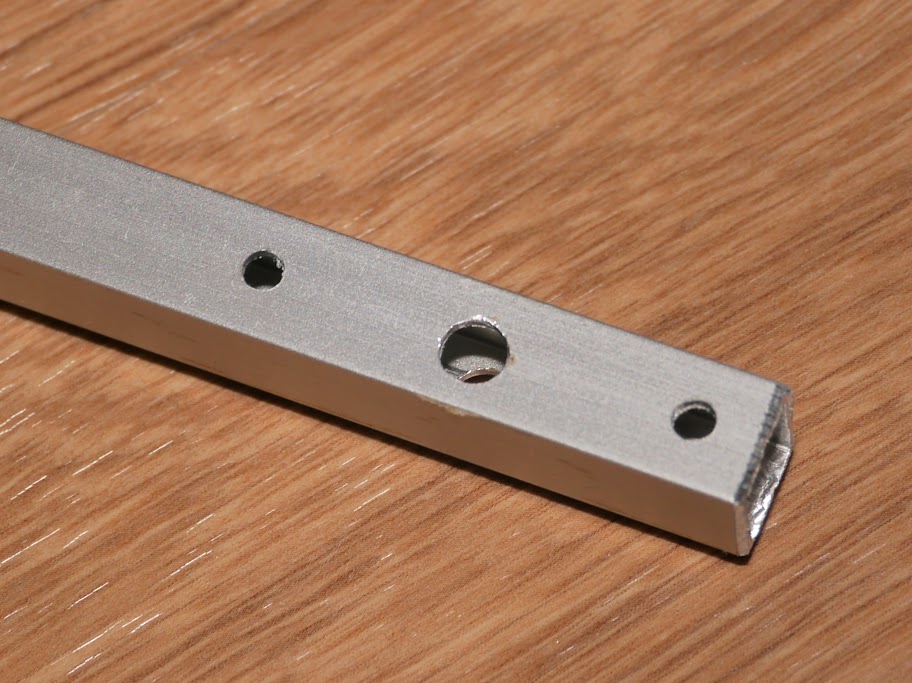
המוטות הגיעו ללא קדחים למנועים (כי לא הייתי בטוח שהתכנון המקורי יתאים למנועים שלי). מנוע KDA 20-22L בנוי בצורה לא קונבנציונלית. כמו שהוא מגיע מהמפעל הציר בולט כלפי מטה והפרופלור יושב על מן מתקן שמחובר מלמעלה. לא רציתי לחתוך את הציר, והפיתרון הפשוט הוא להכין לו מעבר במוט שעליו המנוע יושב (החור האמצעי בתמונה).
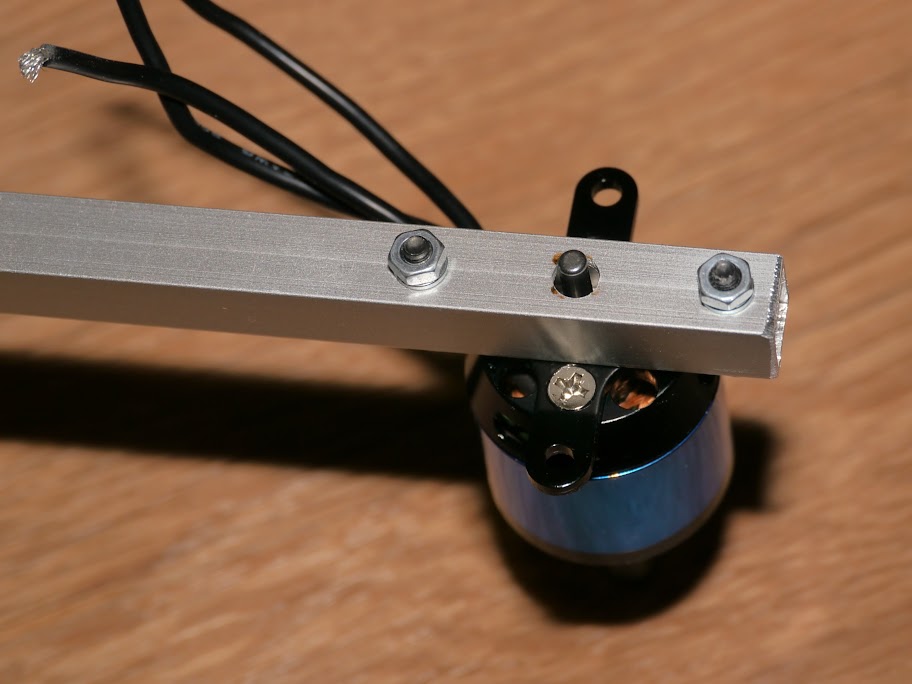
כך ניראה המנוע כשהוא מורכב:
וכך הוא ניראה מלמטה. שימו לב לציר הבולט:
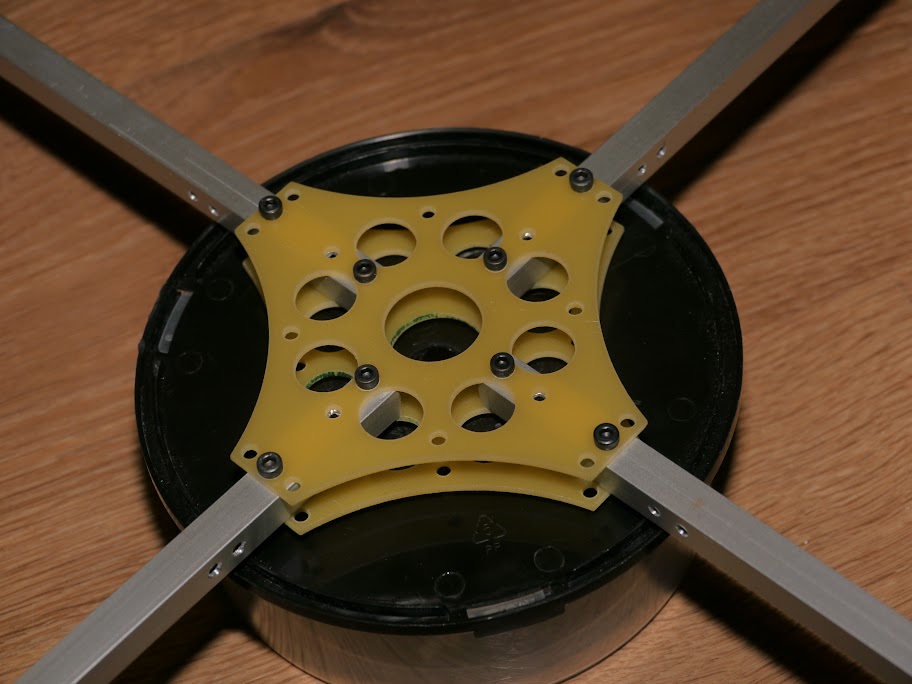
לשילדה הצמדתי קופסה שבתוכה תמוקם רוב האלקטרוניקה בצורה מרווחת יחסית. הקופסה היא קופסת CD פשוטה. בהתחלה תיכננתי להשתמש בקופסת אוכל עם סגירה יפה, אבל מסתבר שהפלסטיק שלה אמנם נראה קשיח אבל מכה קטנה והוא מתפצלח.
לשיכוך זעזועים התקנתי 3 גומיות שדרכן יעבור בורג פלסטיק שיחזיק את הלוח הראשי. הגומיות שימשו במקור לחיבור hard disk של מחשב:
תמונה להשוואה עם הקוואד הישן:
המשך יבוא...
נערך לאחרונה על ידי dror; 24-01-2011 בשעה 20:46:15.
איזו שלדה יפה
"If everything seems under control, you're not going fast enough" Mario Andretti
חבר קהילה ותיק
ערכתי את הפוסט למעלה
מנהל פורום טיסני דלק ופורום אלקטרוניקה
אפרופו שלדה...... דרימר.....
ארז
!!!BEWARE WE ARE IN THE AIR!!!
אחלה רעיון עם הגומיות לשיכוך.. אני מתכוון להעתיק
בדרך בדרך.. מחר אני בדואר
"If everything seems under control, you're not going fast enough" Mario Andretti
בשביל שלדה אחת אתה הולך לדואר ?
פחות משתיים לא היתי עומד בתור .
הוא הזמין 14 יחידות וכמעט גמר את המלאי. בוא לא נחרבן לדרור את השרשור האיכותי
"If everything seems under control, you're not going fast enough" Mario Andretti
מצחיק שהם הכינו שלושה קדחים בבורד ולא ארבעה!!?!
Some things you can only really appreciate from above
אתה צינור: http://www.youtube.com/user/IRonen
חבר קהילה ותיק
לא רק זה, הם אפילו לא מיושרים אחד עם השני.
נו ממשיכים?
אני אם הכל מוכן, בנוי ומחווט?
מה עכשיו, תוכנות/תחנת קרקע?
Some things you can only really appreciate from above
אתה צינור
חבר קהילה ותיק
זה בכל זאת תחביב ואני עובד עליו בזמן הפנוי,שבשבוע האחרון היה מאד מצומצם.
חבר קהילה ותיק
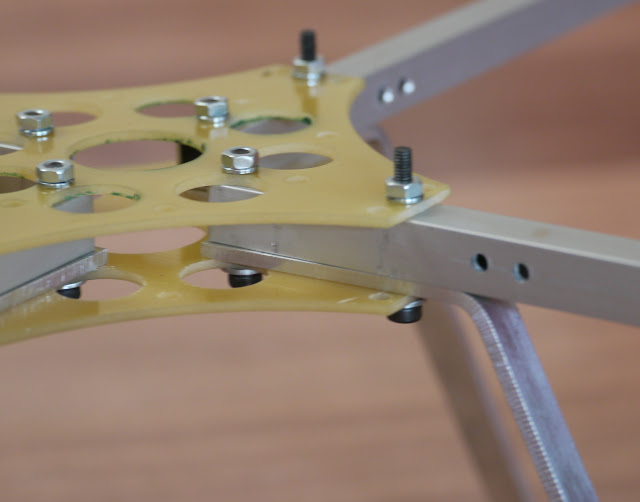
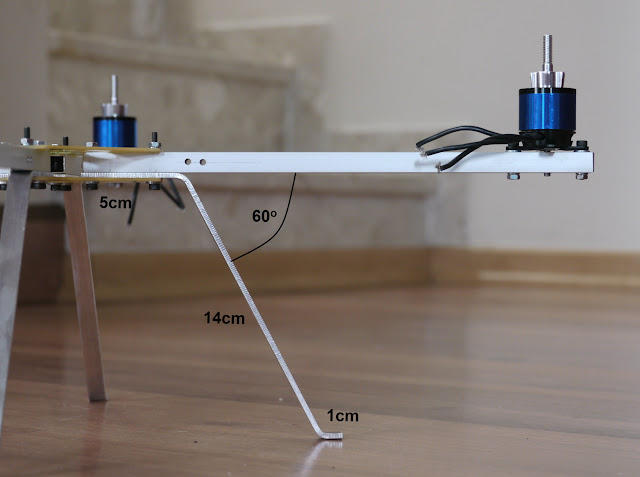
היה לי קצת זמן בסוף השבוע, אז הוספתי רגליות. החומר הוא אלומיניום בעובי 2.5 מ"מ, חתוך לרצועה ברוחב 1 ס"מ. צורת הרגלית נותנת קצת גמישות על מנת לספוג קצת מהחבטה בנחיתות קשות. שקלתי אם לחבר את הרגליות למרכז או מתחת למנועים (כמו בקואד הישן), כרגע חיברתי למרכז, הרגלית עצמה מתאימה לשני המקומות. משקל 4 רגליות בערך 65 גרם.
הרגלית מחוברת בין המוט לפלטה התחתונה. זה נותן קצת עוד מרווח בין הפלטות ומפחית קצת את הצפיפות שם.
הנה המידות:
עוד פרט קטן בחיבור המנוע: יש צורך לרווח קצת עם דיסקיות בין בסיס המנוע והמוט, כי הברגים שמחברים את הבסיס למנוע עצמו בולטים קצת מלמטה.
המשך יבוא...
נערך לאחרונה על ידי dror; 30-01-2011 בשעה 05:32:05.
חבר קהילה ותיק
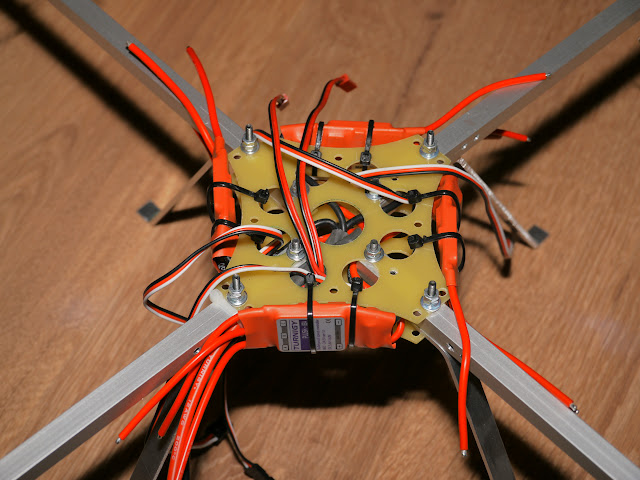
את חיבורי מתח הסוללה של בקרי המנוע הלחמתי ביחד, עם חוטים עבים לסוללה. הוספי עוד שני כבלים דקים עם קונקטורים לטובת אספקה ישירה של מתח הסוללה לאלקטרוניקה (למשל תאורת LED, משדר FPV).
הנה כל הסיפור מורכב, קצת צפוף:
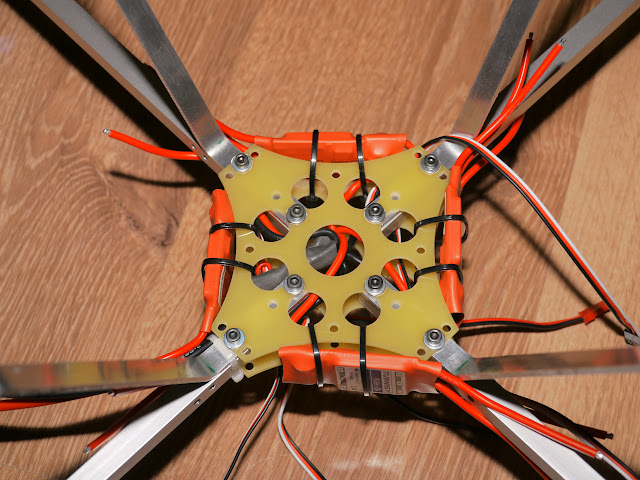
מבט מלמטה:
עד כאן להפעם, המשך יבוא...
נערך לאחרונה על ידי dror; 30-01-2011 בשעה 05:30:09.
חבר קהילה ותיק
עידכנתי את רשימת הקניות וגם את המדריך בראש הפורום עם לינקים ל-LowPriceRC
מסתבר שהם מוכרים פרופלורים במחירים נמוכים בהרבה מהאמריקאים (לא מפתיע).
דרור
חבר קהילה ותיק
התאורה תהיה באמצעות פסי LED על כל זרוע מלמטה ובצדדים. אני מתכוון להטיס את הקוואד בתצורת X. על שתי הזרועות הימניות הדבקתי לדים ירוקים, ועל שתי השמאליות לדים אדומים. מנסיון עם הקוואד הקודם, צבעים נוספים רק עשויים להפחית את הניגודיות. כמה טיפות של דבק חם מחזקות את החוטים הדקיקים.
אני משתמש במקלט Spektrum 6200 שיש לו יחידת לויין. את הלויין חיברתי בקצה אחת הזרועות כך שתהיה ממוקמת רחוק ככל הניתן מהמרכז לטובת Diversity מירבי וריחוק ממקורות שידור (ZigBee, משדר FPV) עתידיים.
את חוטי המנועים העברתי מחוץ למוטות. אפשר היה לנסות להעביר מבפנים אבל זה די קשה במוט 10 על 10 מ"מ, וגם חששתי שיותר מדי חורים גדולים במוט ייצרו נקודות חולשה, אז לא הסתבכתי.
המשך יבוא...
נערך לאחרונה על ידי dror; 06-02-2011 בשעה 20:54:43.
חבר קהילה ותיק
התמונה הבאה (היישר מ-DIYDrones) מראה את כיוון סיבוב המנועים. שימו לב שאין הבדלי חומרה כלשהם בין מצב X למצב +:
במהלך ההרכבה השארתי זוג חוטים של כל מנוע מחובר זמנית. לאחר מכן הפעלתי כל בקר מנוע בנפרד וסימנתי אם הוא מסתובב בכיוון הרצוי או לא, ובהתאם חיברתי סופית את זוג החוטים
הגדרות ראשוניות של כל בקר מנוע נעשו בעזרת כרטיס תיכנות, לכל בקר בניפרד. מחברים קודם את הכרטיס לכבל הבקרה ואח"כ סוללה.
כמה הסברים על ההגדרות:
ברחפנים, בקרי המנוע צריכים להיות כמה שיותר טיפשים. אסור שיתפסו יוזמה משלהם, שלא בידיעת בקר הטיסה וללא תיאום עם שאר בקרי המנוע. הדבר החשוב ביותר הוא cutoff. הגנה על הסוללה צריכה להיעשות בצורה מרכזית - לפחות על ידי זמזם ורצוי כחלק מפעולת בקר הטיסה. אם בקר מנוע יחליט לחתוך ביוזמתו כי נידמה לו שהסוללה ניגמרת, הדבר ייפגע בשליטה במיקרה הטוב, ויביא לריסוק במיקרה הרע - ואז הגנו על סוללה של $25 אבל איבדנו כלי טייס של $500.
היות וכך, גרמתי לבקר להאמין שיש לי סוללת NiMH והגדרתי לו מתח cutoff נמוך. בבקרי Turnigy זה מבטל לחלוטין את מצב ה-cutoff.
המנוע שלי הוא בעל 14 קטבים, ותיזמון המנוע המתאים לפי חוברת ההסבר של בקר המנוע הוא middle.
לבסוף כיילתי את ה-throttle של כל מנוע בניפרד על ידי חיבור המקלט, העברת סטיק המצערת למקסימום, חיבור סוללה והמתנה לשני צפצופים, הורדת המצערת למינימום והמתנה לצפצוף אחד, ואז ניתוק הסוללה.
המשך יבוא...
נערך לאחרונה על ידי dror; 06-02-2011 בשעה 21:31:27.
חבר קהילה ותיק
כך נראה הרחפן לאחר סיום חיווט השילדה:
כעת נותר עוד למתקן את הסוללה ולהרכיב את קופסת האלקטרוניקה, ואז להתקין את התוכנה.
המשך יבוא...
נערך לאחרונה על ידי dror; 06-02-2011 בשעה 21:34:33.
חבר קהילה ותיק
נערך...
מנהל פורום מסוקי דלק
יפה מאוד.
לא כדאי לחסוך קצת משקל עם האזיקונים ?
If you can't make it fly, try harder, else RTFM
חבר קהילה ותיק
אתה לא שואל ברצינות, נכון?
מנהל פורום מסוקי דלק
+
If you can't make it fly, try harder, else RTFM
למה אתה לא עובד עם בולטים עם המנועים-בקרים?
"If everything seems under control, you're not going fast enough" Mario Andretti
 הרשאות פרסום
הרשאות פרסום

 ציטוט ההודעה בתגובה
ציטוט ההודעה בתגובה